Most images contain hyperlinks.
Active Perception and Robotic Grasp Prediction
June 2023
We developed an AffordanCE-driven Next-Best-View planning policy (ACE-NBV), which effectively guides the robot arm to find feasible grasps for target objects by continuously observing scenes from new viewpoints.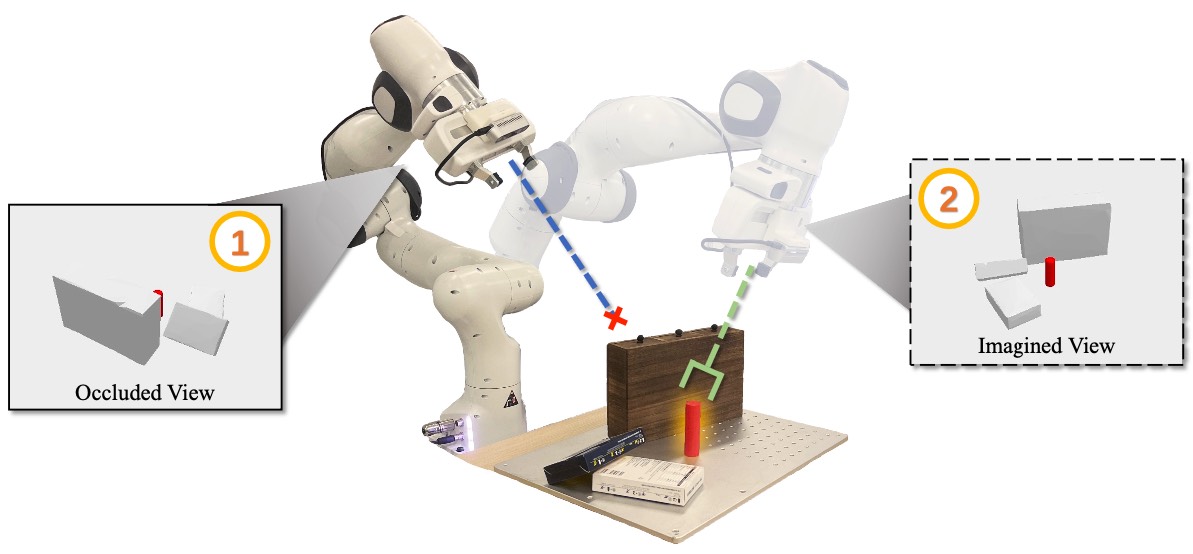
Swarm Robots System for Cooperative Construction
Sept.2022
We designed a cluster of Mecanum wheeled robots for transporting blocks/slopes and building multi-layer structures.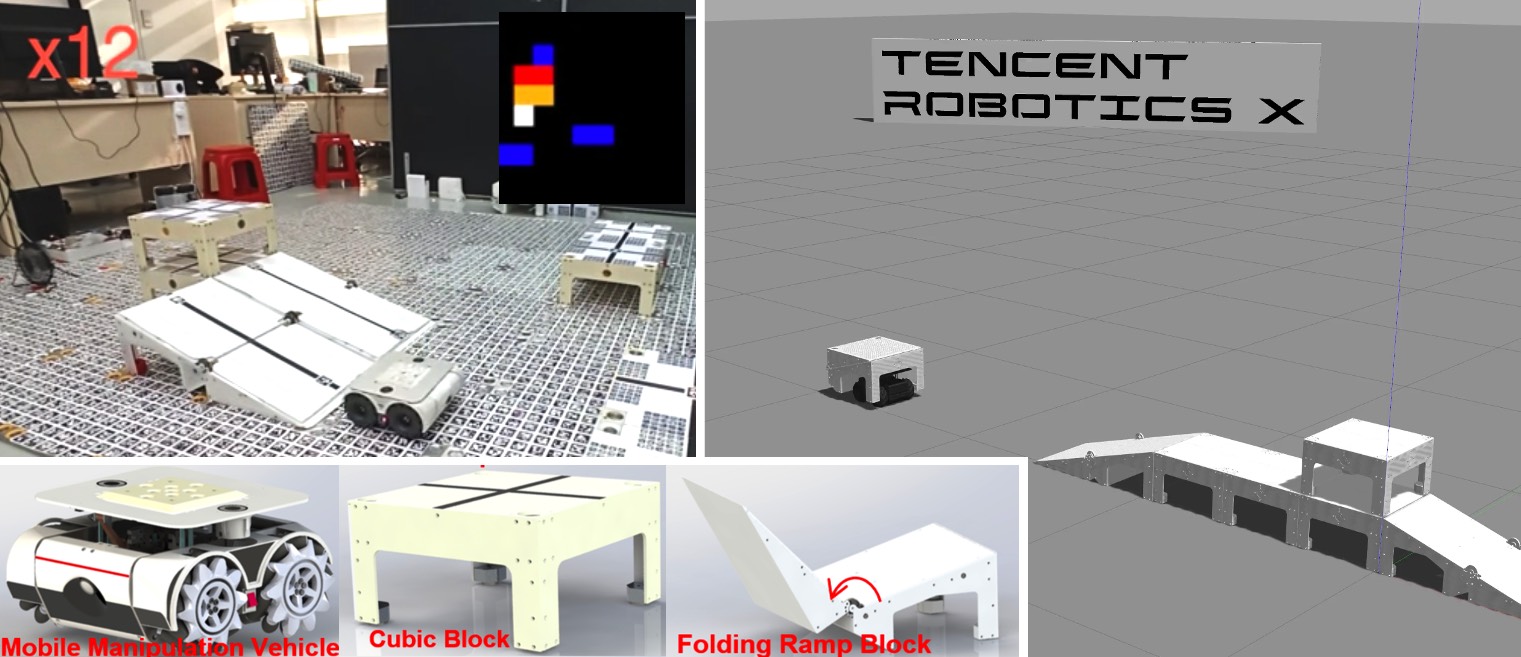
Real-Time Digital Twin Platform of Multi-Robots
Mar.2022
We developed a multi-robot testbed that exploits the ideas of digital-twin system.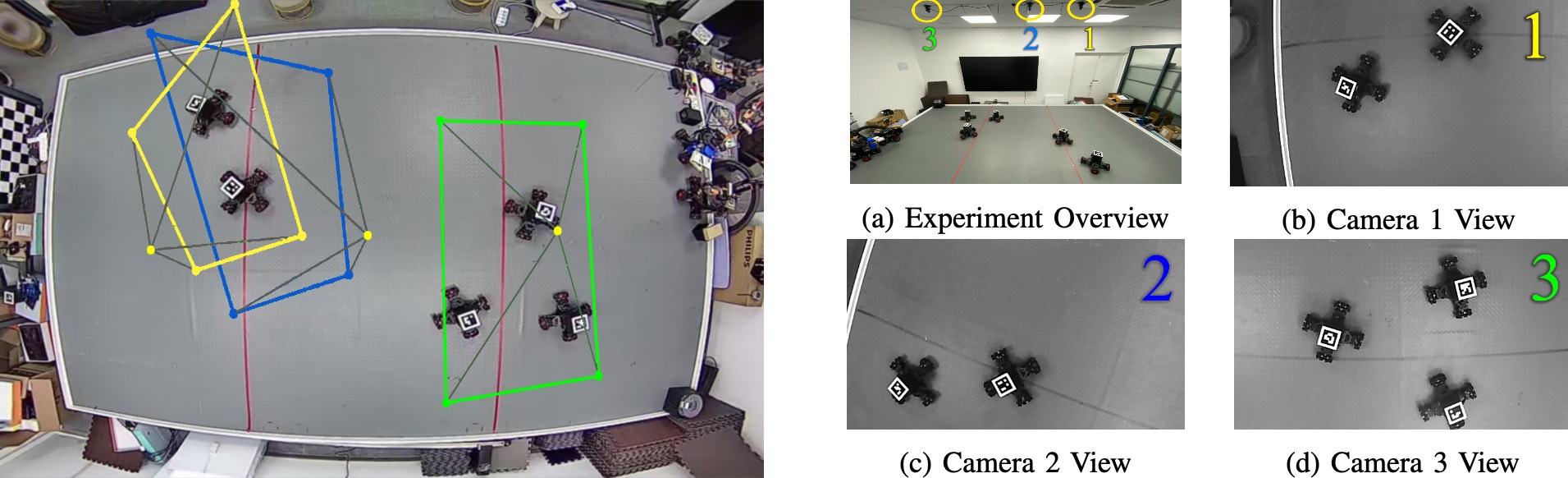
Spot Micro Quadruped Project
Dec.2020
I recreated an open source four-legged robot project and submitted my contribution. This project includes motion control of a 3D printed spot micro robot, including sit, stand, angle and walk control.
Self-balancing Bicycle
Nov.2020
I designed a self-balancing bicycle robot, measuring 450×120×240mm in size, which was manufactured using 3D printing
and utilizes an IMU to obtain its own posture, while a flywheel system is used for balance.
Tabletop Grasping Robot Project
Nov.2020
We designed a desktop object-grasping robot that uses DexNet for grasp pose prediction algorithms. We trained our own neural network and explored the use of RGBD sensors and the ROS framework.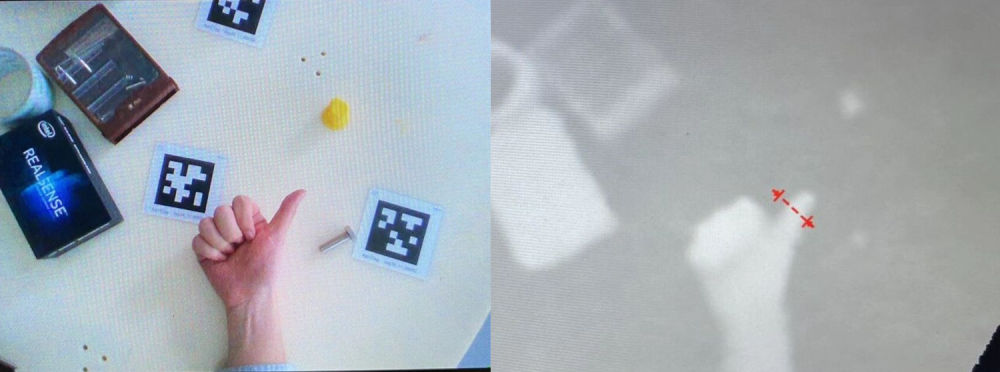
Gomoku Robot
Sept.2020
We designed a Gomoku (Five-in-a-Row) robot that utilizes a suction cup as the end effector for a robot arm to accomplish the pick-and-place of game pieces. The system employs a camera and computer vision algorithms for piece recognition and utilizes the AlphaZero_Gomoku strategy for decision-making.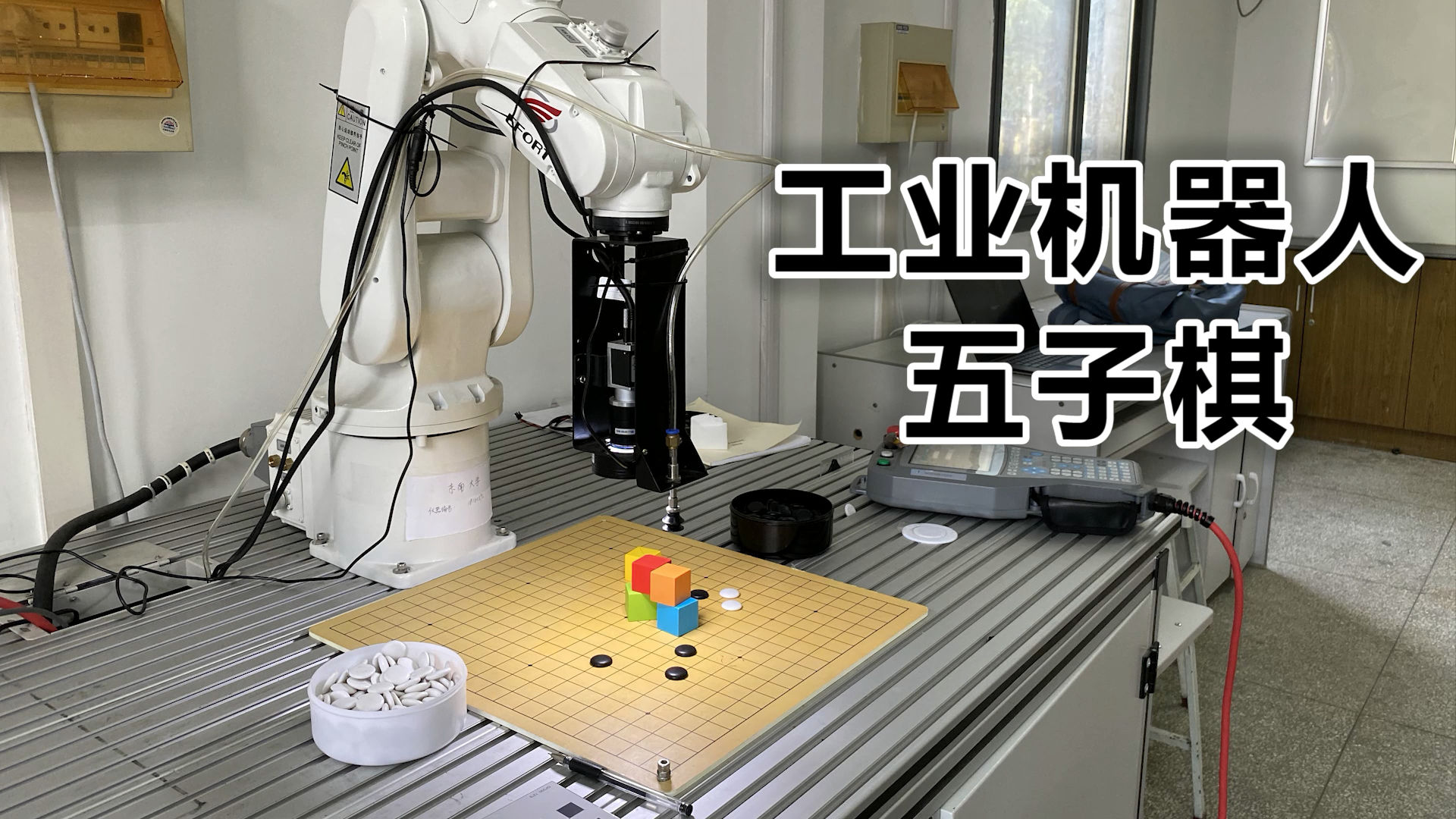
Supermarket Shelf-stocking Robot
Apr.2020
We constructed a small forklift with a Mecanum wheel chassis in the Webots simulation environment. We implemented functions such as the vehicle’s automatic navigation, task planning, and the pick-and-place of goods.
Supercapacitor-Powered Vehicle with Wireless Charging
Oct.2019
We designed an intelligent car with differential drive, measuring 340×245×165mm in size, which is powered by supercapacitors, capable of wireless charging at 30W through self-made circuits, and utilized inductors to detect alternating currents for navigation.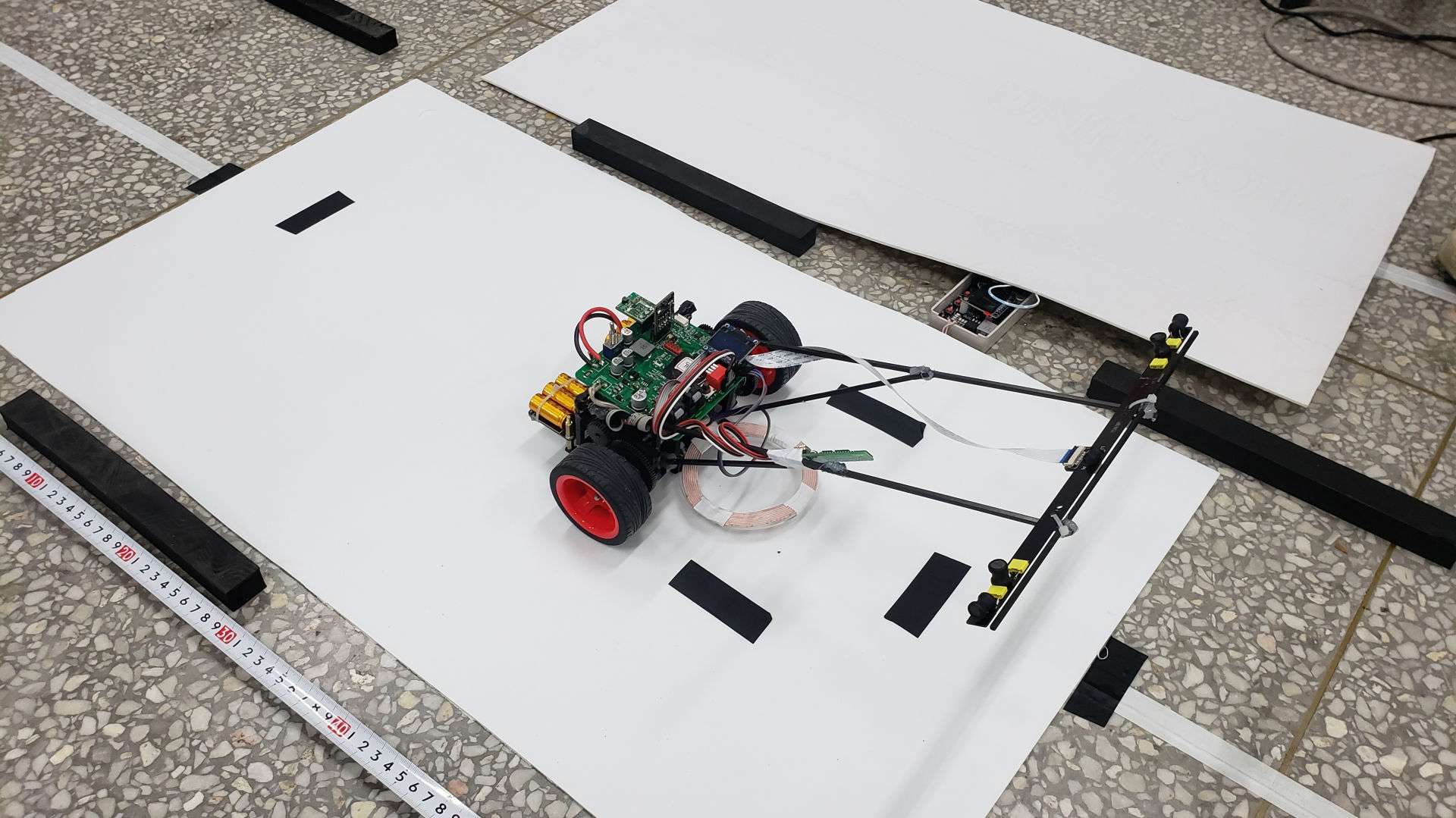
Mecanum-Wheeled Robotic Chess Strategist
Aug.2019
We designed a Mecanum wheeled chess-playing robot, measuring 470×480×960mm in size, which utilizes IMU and cameras for self-positioning, an electromagnetic system for moving chess pieces, and algorithms for solving the Eight Queens problem and playing the Quoridor.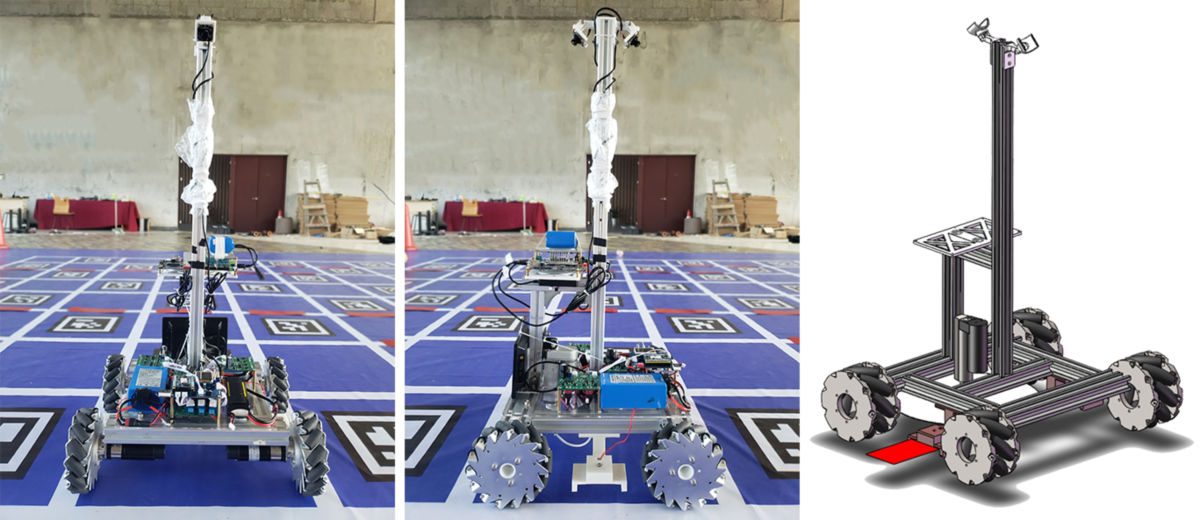
Vision-Guided Balancing Robot
Mar.2019
We designed a two-wheeled differential drive robot capable of obtaining its own posture using an IMU and achieving upright balance through a PID control algorithm. It utilizes a camera to recognize its surroundings and accomplish automatic navigation.
FIRST LEGO League
July 2015
An international robot competition using LEGO Mindstorms technology.