机器人模型设计
本学期的《机器人软件工程》课程实验在 Webots 仿真平台上进行,仿真环境如图所示,机器人的任务是根据需要抓取货仓中摆放的货物,填补到四面货架的合适位置上。
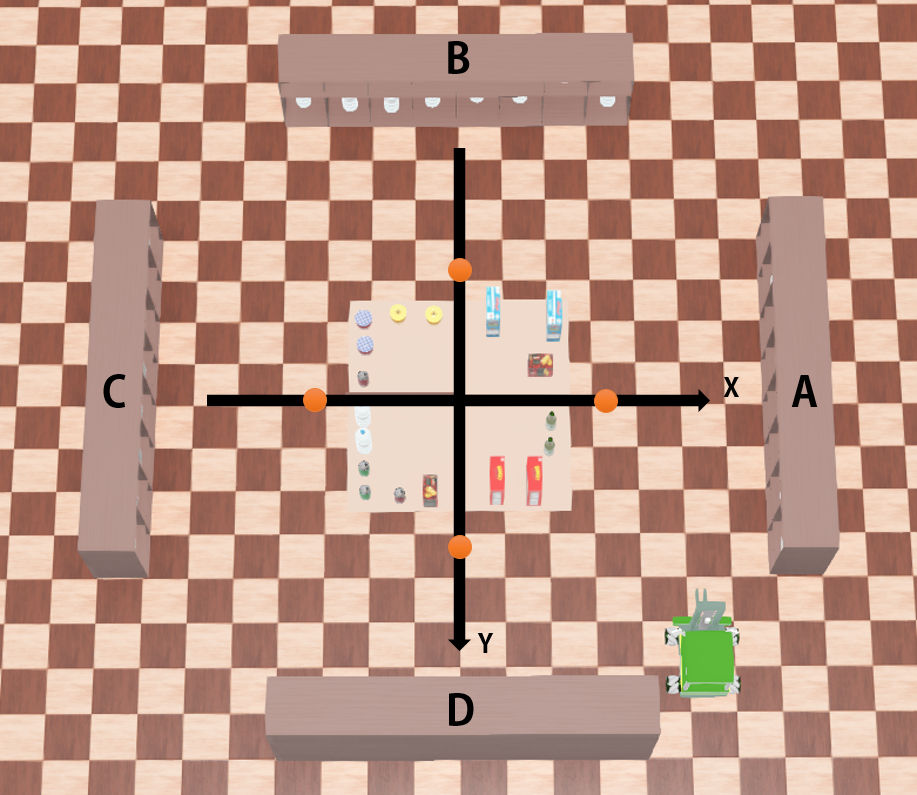 仿真环境
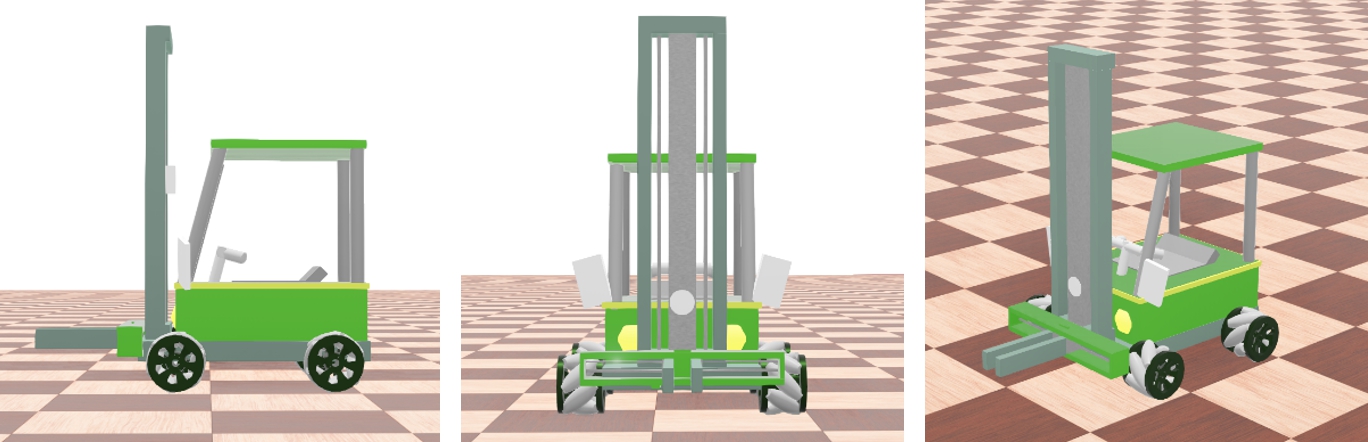
仿真环境针对这一任务,我和 贝塔 设计了一款超市机器人“Super_Transbot”。
四个麦克纳姆轮组成的全向运动底盘,保证了机器人在狭小空间内的移动性能,内置了 GPS 以及电子罗盘模块实现自主定位。
机器人前后分别设置一颗摄像头,用于识别货架上、货舱内的货物,并返回相应的类型和位置信息。
模仿叉车外形,前部设置了一个二自由度的机械臂,末端抓手设置了一对力传感器,实现对不同大小的货物的抓取功能,并能将货物提升到任意高度,对应题目中的双层货架要求。
 机器人模型
机器人模型机器人模型搭建
为了在 Webots 仿真平台中高效地搭建出机器人,我们充分遵照软件工程复用思想,将例程中“KUKA youBot”的麦克纳姆轮打包成 PROTO,从而实现麦轮节点的复用。四个麦轮直径 0.10m,通过 HingeJoint 安装在车身主体结构上。
车身整体尺寸为 0.59m×0.40m×0.64m(长宽高),搭建车身时采用模块化设计,主要分为车身、机械臂两部分。车身主要由 Transform、Shape 嵌套而成,主要利用到的几何体包括 Cylinder、Box 等;机械臂主要是在 Pioneer3 所配置的机械臂的基础上进行适当改造,包括尺寸、电机扭矩及直线电机伸展长度等,同时在机械臂的抓手增加了一对力传感器,以实现对物品抓取力度的精准控制。
机器人配置的摄像头分辨率为 256*128,视角 1.8,配备 Webots 自带的 Recognition API,一定程度上减少了物品识别的难度,使仿真专注于整体软件功能的开发,体现了离线编程的优势。
为了实现更精确的物理仿真,我们还对机械臂抓手、麦轮的摩擦力参数进行了设置,以保证机器人能够在当前环境保持正常的运动;此外,还设置了合适的车身重量,以保证车辆的运动性能更加优越、抓取稳定性更好。
机器人控制器设计
为了实现流畅的取货补货功能,机器人控制器采用了状态机的思想,初始化完毕后进入 switch 状态机切换,其中 main_state 共九个状态:
switch (*main_state)
{
case Init_Pose
case Recognize_Empty
case Arround_Moving
case Grab_Item
case Back_Moving
case TurnBack_To_LoadItem
case Item_Loading
case RunTo_NextShelf
default
}
Init_Pose 为初始默认进入工作区状态,到达上图橙色点位后跳转到 Recognize_Empty,对货架进行识别。
Recognize_Empty 为识别空货架状态,这个状态主要调用了识别货架的函数,识别完成后将货架上的货物状态更新到数组,若有缺货则进行补货判断,计算出需要的货物名称以及需要放置的位置,然后跳转到 Arround_Moving 寻找货品;若没有缺货则跳转到 RunTo_NextShelf 状态,前往下一个货架进行检测。
Arround_Moving 为环游巡检状态,运动过程中一直保持之前暂存的货物名称,以对货仓进行实时检测判断,直到找到了合适可抓取的货物,跳转至 Grab_Item。
Grab_Item 为抓取仓库货物状态,根据暂存的货物名称行进到指定货物的抓取位置,控制机械臂进行抓取,提升后跳转至 Back_Moving 返程。
Back_Moving 为回程存货环游状态,机器人会携带着需要的货物返回之前的货架,此时需要进行路径规划选择一条最短路线,到达货架前后跳转至 TurnBack_To_LoadItem。
TurnBack_To_LoadItem 为转身面向货架状态,紧接着跳转至 Item_Loading 状态。
Item_Loading 为上货状态,根据货物需要放置的位置计算出机器人的目标位置,之后完成上货操作,跳转至 Init_Pose。
RunTo_NextShelf 为前往下一货架状态,根据存储的坐标进行路径规划,当到达下一货架定点时,跳转至 Recognize_Empty。
default 为错误报警状态。
利用上述九个状态构成的状态机,能够较地完成对机器人装卸货物的任务要求,各状态内部操作的封装也使得我们的控制器看起来更加简洁干练。
控制器关键函数
基本运动封装
void lift(double position);
给定高度,使机械臂上升直线电机运动到指定位置。
void moveFingers(double position);
给定宽度,使机械臂手中左右两个直线电机运动到指定位置。
bool Moveto_CertainPoint(double fin_posture[], double reach_precision);
给定位姿 fin_posture,包括 x、z 坐标与姿态角 angle;给定位控精度 reach_precision;内嵌函数 caculate_tmp_target(),给定目标位姿 double fin_posture[],根据当前位姿与目标位置,进行位姿的线性插值,差值结果保存在 tmp_posture[] 中作为下一临时目标位姿。 为了解决罗盘值在 2π与 0 之间跳转时出现的机器人原地旋转一圈的冗余运动,因此在姿态角的线性差值前引入逻辑判断:if (fabs(fin_posture[2] - compass_angle) > PI) 以达到向旋转角度更小的方向作旋转运动。
识别空货架
bool Find_Empty(WbDeviceTag camera)
选定车体后侧摄像头,调用 API 识别货物,根据货架大小拟合公式,计算货架上货物的位置更新存入数组。具体来说,每格货架的宽度为 0.25,给机器人设置的定点位于货架水平方向中间,因此可以由检测到的货物与摄像头的相对位置,来判断货物位于哪一列货架。为高矮两种货架高度设置不同的阈值后,也可以根据纵向的相对位置来判断货物位于哪一层。
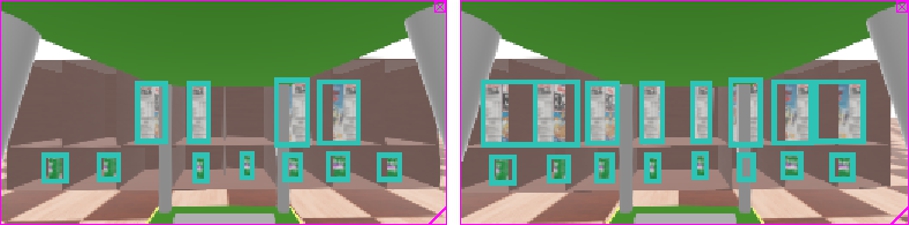
货架识别示意图寻找货物
bool Find_Goods(WbDeviceTag camera,char *good_name,int *item_grasped_id);
选定车体前侧摄像头,给定物品名 good_name,货物 ID 号 item_grasped_id,通过调用 API 识别并判断视野中货物信息(包括 ID、尺寸等),返回是否找到待存放货物的 bool 类型变量。考虑到机械臂的抓取能力,寻找的过程中滤除了距离机器人过远的货物,只考虑当前面对的货仓区域。

货物识别示意图对准并抓取
bool Aim_and_Grasp(int *grasp_state, WbDeviceTag camera, int objectID);
选定车体前侧摄像头,传入给定的货物 ID 号来锁定摄像头目标。将抓取货物分为“调整位置、抓、举”三个步骤。首先针对不同货物的大小计算一个最合适的抓取位置,然后根据摄像头返回的物体大小粗略地计算手抓的位置,此时激活力传感器,不断收紧抓手直到力传感器达到阈值,表示已经抓紧物体,最后抬升物体达到指定高度,完成抓取功能。
返回货架
TurnBack_To_LoadItem
这部分算法直接包含在状态机内,根据货物的目标位置,计算机器人水平方向相应的偏移距离,给定一个固定的前后偏移,将上货路径分为两步,由此确定机器人的行驶路径。
机器人软件开发与质量管理
最后呼应一下课程名《机器人软件工程》,总结一下我们在开发过程中学习到的一些思路:
模块化与抽象化技术 在整个超市机器人补货的复杂任务的前提下,将其拆分为“查货架”、“寻货”、“取货”、“回库”及“上货”五个易解决的小任务,实现了任务的模块化;对于每个独立的任务,只考虑该任务本身所需要的入参出参,忽略其细节(比如如何实现、如何计算等),实现了任务的抽象化。
信息隐藏及局部化技术 对于获取机器人位置、方向角以及商品名的获取等类似只读操作,将其封装成功能函数,只返回需要读取的内容,而不能对其源头进行改动,实现了一定程度上的信息隐藏;而对于主状态的跳转,将其约束在状态机函数中,只能在此处进行更改,而不允许在子函数中发生改变,体现了主状态的局部化。
复用技术 在超市机器人的模型设计中,大量使用 USE 操作,实现各节点属性的复用;同时,将麦克纳姆轮的模型封装成 PROTO 节点,使其能够为机器人底盘搭建起到重复使用效果。利用这些复用技术一定程度上减少了超市机器人模型搭建的工作量。
版本控制 为了实现项目良好的管理,我们采用了 GitHub 仓库进行版本控制,每次工作时进行拉取、合并、提交等必须的流程,同时附以简短的提交日志便于对方了解提交内容。除此之外,每完成一个功能之后,利用腾讯会议及 QQ 屏幕共享等软件交流讨论,同时对接下来的工作进行适当的调整和分配,明确各自的任务,并督促对方及时完成。
本次项目已经托管在 GitHub 平台。