Xuechao Zhang
Hi there! I’m currently a robotics researcher at ASU.
To me, robotics isn't a buzzword, but a pure joy of engineering fulfillment. I always enjoy getting my hands dirty, finding great joy in designing and building customized robots from scratch.
Always curious, eager to explore, and passionate about reshaping the environment.
When not coding or tinkering with robots, I enjoy running, swimming, and cycling (sounds like a triathlon training😼).
Github
/
G. Scholar
/
LinkedIn
/
E-mail
/
My arXiv Daily

News
MAY 2026
Back to Apple! Heading to Cupertino for an internship! 🍎JUN 2025
Attended RSS 2025 in Los Angeles, California!MAY 2025
Attended ICRA 2025 in Atlanta, Georgia!JAN 2025
Started a new journey at ASU! 🌵APR 2024
Started as a robotics intern at Apple in Shanghai! 🍎MAR 2024
Obtained my Master's degree from SJTU! Grateful for the amazing time! 🎓TwinTrack: Bridging Vision and Contact Physics for Real-Time Tracking of Unknown Dynamic Objects
Wen Yang, Zhixian Xie, Xuechao Zhang, Heni Ben Amor, Shan Lin, Wanxin Jin
Arxiv 2025
Webpage
•
Paper
•
Video
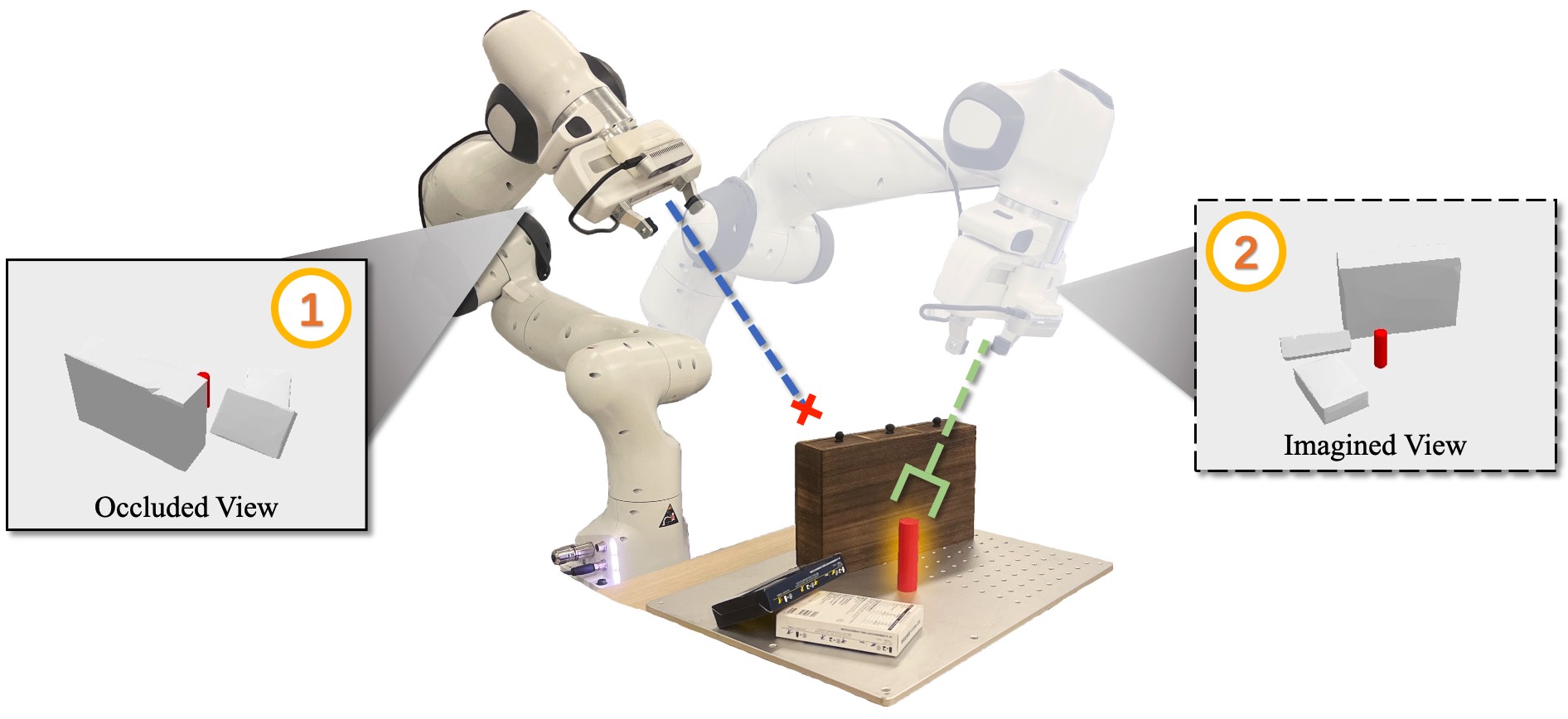
Affordance-Driven Next-Best-View Planning for Robotic Grasping
Xuechao Zhang, Dong Wang, Sun Han, Weichuang Li, Bin Zhao, Zhigang Wang, Xiaoming Duan, Chongrong Fang, Xuelong Li, Jianping He
Conference on Robot Learning (CoRL) 2023
Webpage
•
Paper
•
Video

2026.04
We developed a CUDA-based ray tracer featuring Monte Carlo path tracing and importance sampling, integrated with snow simulation driven by Taichi MPM. By utilizing Meshy AI for architectural asset refinement, we rendered a photorealistic "impossible" blizzard scene of the ASU Old Main (snow is a extreme rarity in Arizona).
2025.04
I developed a vision-guided path planning system that enables the myCobot Pro 600 robot to autonomously solve physical mazes.

2025.01
I built a UR10e-based automation system for hardware validation, fusing RGBD and force-torque sensing to perform precise cable plugging and human-like device interactions. The solution was deployed across multiple international R&D centers.

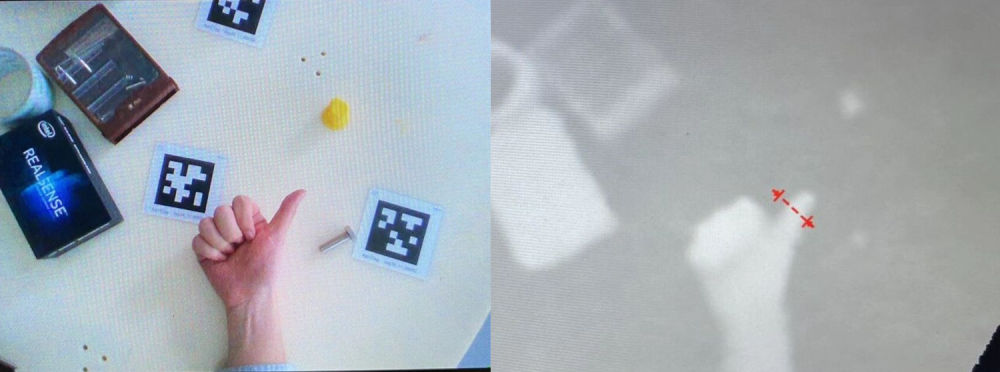
2023.06
We conducted research on robotics grasping problem in cluttered desktop environments. We utilizes a parallel-gripper and incorporates NeRF (Neural Radiance Fields) for enhanced pick-and-place performance across various object categories.

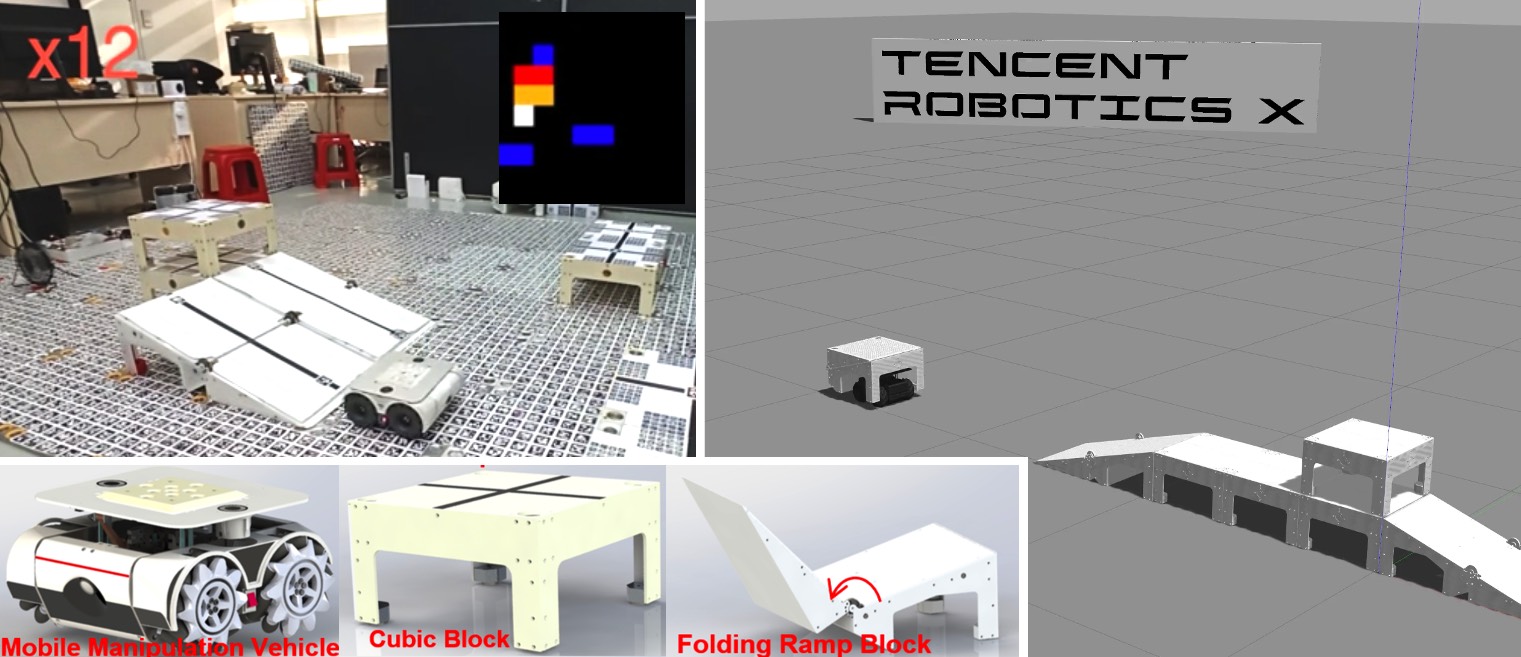
2022.09
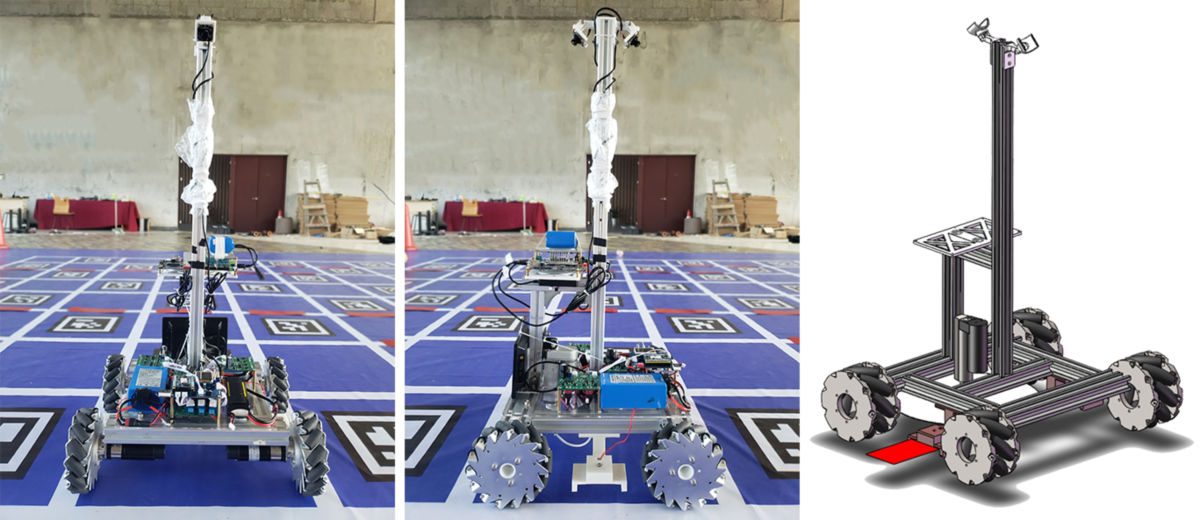
We designed a cluster of Mecanum wheeled robots for transporting blocks/slopes and building multi-layer structures.
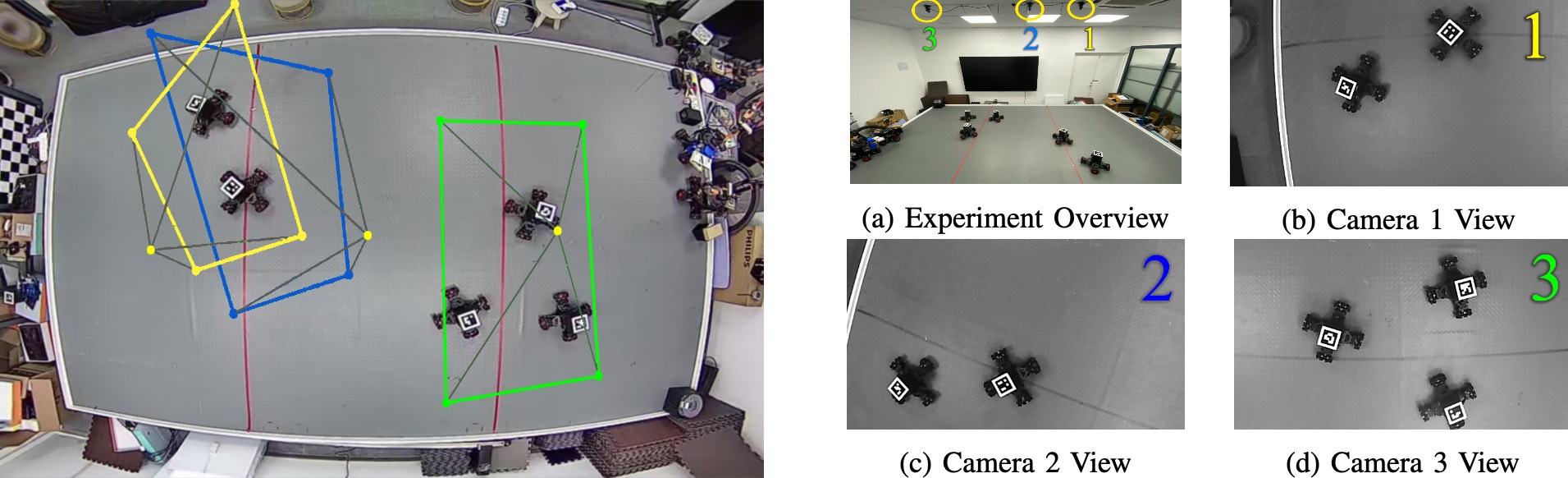
2022.03
We developed a multi-robot testbed that exploits the ideas of digital-twin system.
2020.12
I recreated an open source four-legged robot project and submitted my contribution. This project includes motion control of a 3D printed spot micro robot, including sit, stand, angle and walk control.

2020.11
I designed a self-balancing bicycle robot, measuring 450×120×240mm in size, which was manufactured using 3D printing and utilizes an IMU to obtain its own posture, while a flywheel system is used for balance.

2020.11
We designed a desktop object-grasping robot that uses DexNet for grasp pose prediction algorithms. We trained our own neural network and explored the use of RGBD sensors and the ROS framework.
2020.09
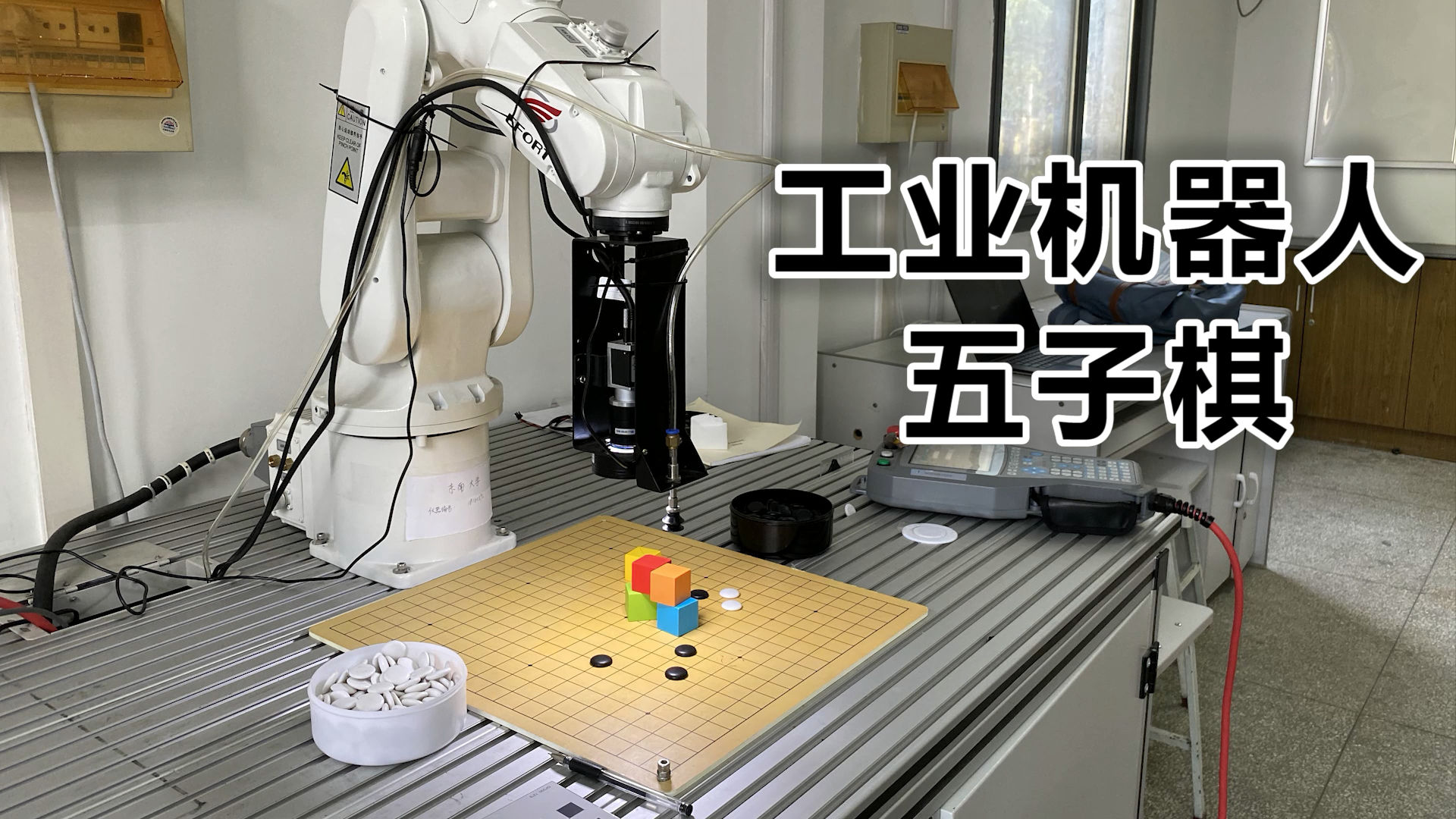
We designed a Gomoku (Five-in-a-Row) robot that utilizes a suction cup as the end effector for a robot arm to accomplish the pick-and-place of game pieces. The system employs a camera and computer vision algorithms for piece recognition and utilizes the AlphaZero_Gomoku strategy for decision-making.
2020.04
We constructed a small forklift with a Mecanum wheel chassis in the Webots simulation environment. We implemented functions such as the vehicle's automatic navigation, task planning, and the pick-and-place of goods.

2019.10
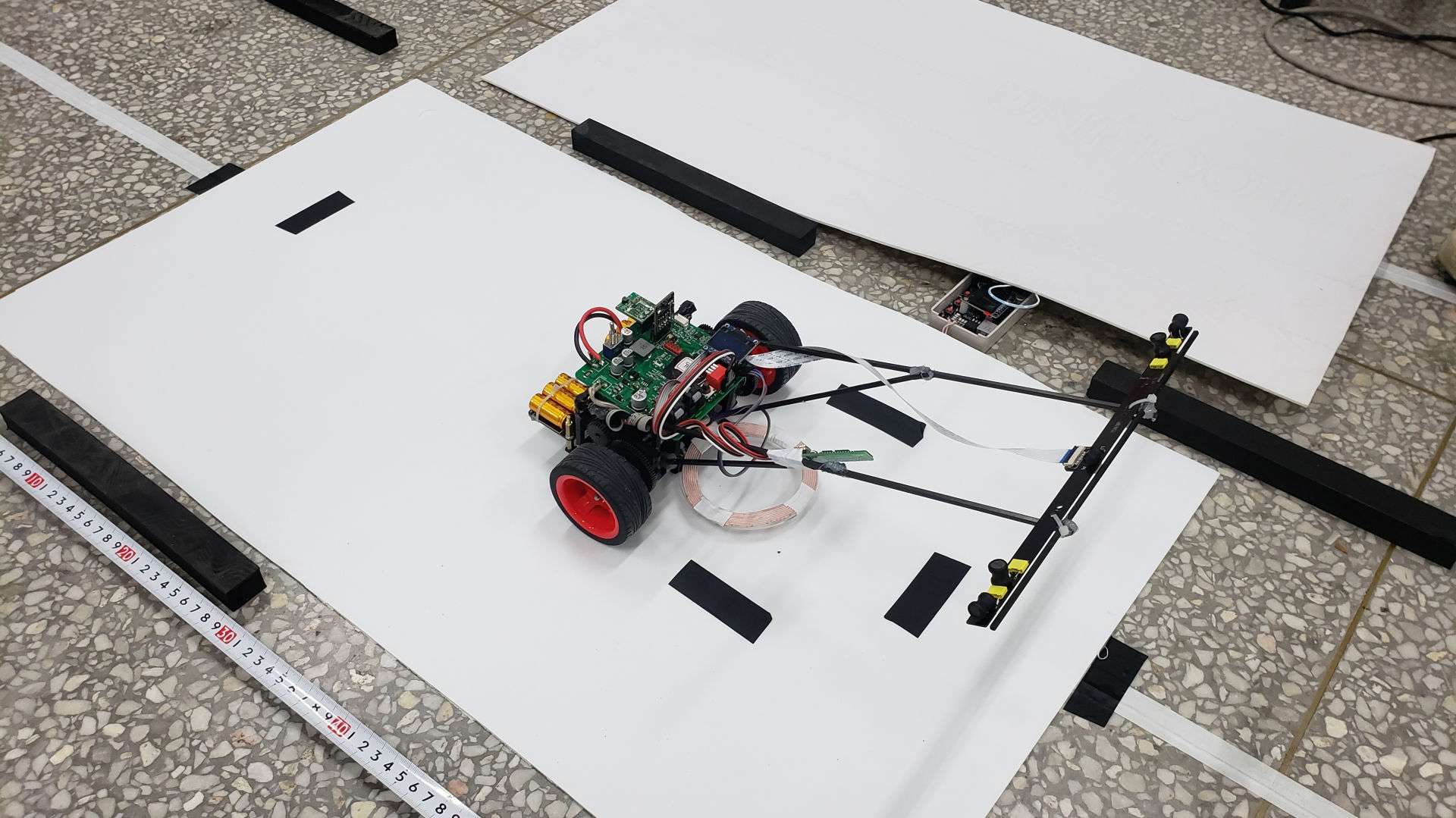
We designed an intelligent car with differential drive, measuring 340×245×165mm in size, which is powered by supercapacitors, capable of wireless charging at 30W through self-made circuits, and utilized inductors to detect alternating currents for navigation.
2019.08
We designed a Mecanum wheeled chess-playing robot, measuring 470×480×960mm in size, which utilizes IMU and cameras for self-positioning, an electromagnetic system for moving chess pieces, and algorithms for solving the Eight Queens problem and playing the Quoridor.
2019.03
We designed a two-wheeled differential drive robot capable of obtaining its own posture using an IMU and achieving upright balance through a PID control algorithm. It utilizes a camera to recognize its surroundings and accomplish automatic navigation.

2015.07
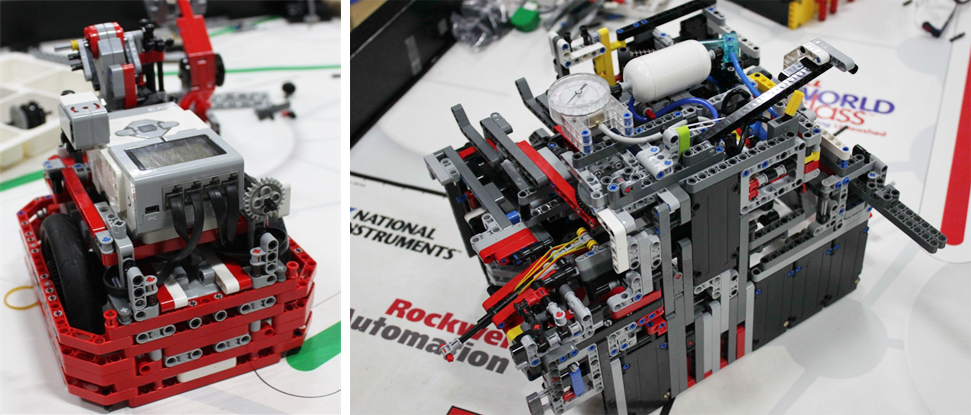
An international robot competition using LEGO Mindstorms technology.
∞






