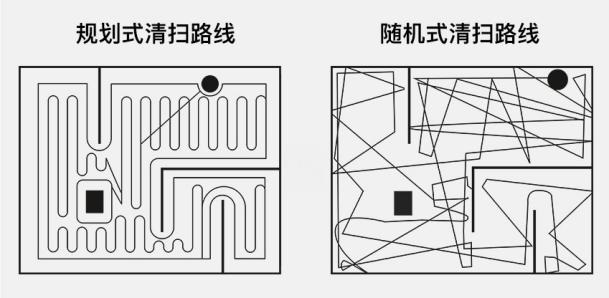
随着移动机器人、无人驾驶的发展,行业对 SLAM 技术的需求逐渐提高;另一方面,传感器技术的发展以及算法的进步使得 SLAM 技术也进入了从算法到产品转化的阶段。因为经常关注科技新闻,我还记得前几年扫地机器人盛行的时候,大量的产品采用的还是随机覆盖法,即检测到障碍就改变前进方向,可想而知其清扫效率往往不尽如人意,而这时某些厂商拿出了 SLAM 建图导航等功能作为一大卖点,在我看来这也是实现其智能化的关键一步。
 扫地机器人路径规划
扫地机器人路径规划SLAM,即同步定位与地图构建(SLAM 或 Simultaneous localization and mapping),引用一段维基上的解释如下:
SLAM 是一种概念:希望机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。
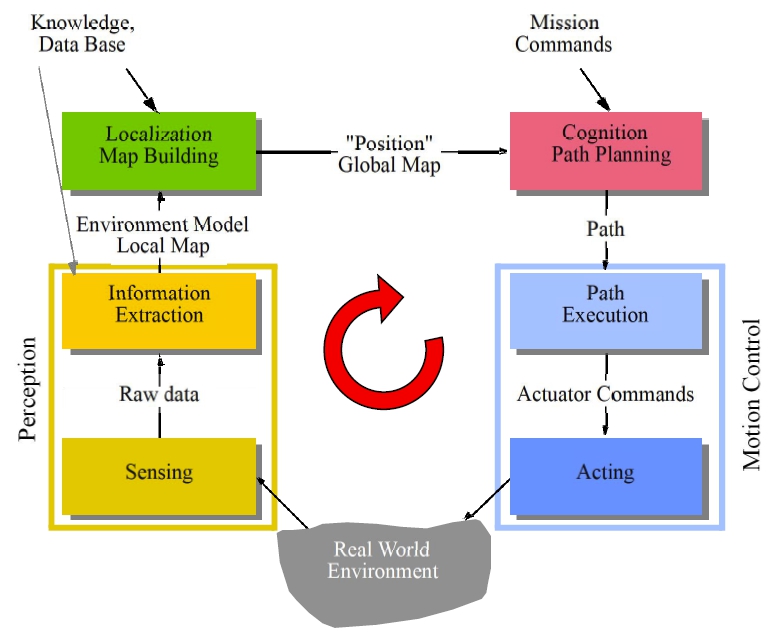
智能移动机器人的三个关键问题是“我是谁?”、“我要去哪?”、“我该怎么去?”。要实现导航,就需要采用合适的模型对周围的环境进行描述,根据环境中可观测的特征对自身进行定位。定位本质上可以定义为一个估计问题,通过传感器观测的存在不同程度的噪声的数据来估计位置;也可以定义为一个优化问题,通过多种观测数据之间的约束关系对位置进行优化。当然,噪声越低的传感器能够获得更好的定位精度,但需要在价格和精度上寻求平衡,目前常见的传感器有:激光雷达、深度摄像头、双目摄像头、IMU(惯导单元)等等。 建图实际上是在定位的基础上,将观测数据进行融合、把新的特征加入已有的世界模型中的过程。其难点在于需要实时跟踪地图的变化,回环并减小不确定性。
 移动机器人控制模型
移动机器人控制模型ORB-SLAM 是一个基于特征点的实时单目摄像头 SLAM 系统,用我自己的一句话概括其原理就是,**利用前后两帧图像中多组不变的特征点,计算相机坐标在两帧之间的相对运动,同时实现定位和建图。**支持宽基线的闭环检测和重定位,包括全自动初始化。该系统主要包含以下模块:跟踪(Tracking)、建图(Mapping)、重定位(Relocalization)、闭环检测(Loop closing)。项目主页,GitHub 地址,论文地址。
在本学期的《机器人技术基础》研讨课中,我和队友选择了这一种算法作为我们的入门教材,希望借此对 SLAM 系统有一个基本的认识。
前序知识
- ORB 特征
ORB_SLAM2 中使用 2011 年首次发布的 ORB 算子进行特征点的提取与描述,ORB 算法原理主要来自于文章 ORB: an efficient alternative to SIFT or SURF。
在现实生活中,我们从不同的距离、方向、角度或者不同的光照条件下观察一个物体时,物体的大小、形状、明暗都会有所不同,但我们的大脑依然可以判断它是同一件物体。为了让计算机也掌握这种特征,理想的特征描述子应该具备这些性质,即在大小、方向、明暗不同的图像中,同一特征点应具有足够相似的描述子,称之为描述子的可复现性(鲁棒性)。使用 BRIEF 算法得到的描述子并不具备以上这些性质,而 ORB 算法将基于 FAST 关键点的技术和基于 BRIEF 描述符的技术相结合,因此称为 ORB(Oriented FAST and Rotated BRIEF),主要解决 BRIEF 描述子不具备旋转不变性的问题。虽然没有解决尺度一致性问题,但在 OpenCV 的 ORB 实现中采用了图像金字塔来改善这方面的性能。
这里对 ORB 算法的具体原理不做详细的探究,只了解其是一种速度超快、且在一定程度上不受图像变换影响特征提取算法。学习具体原理可以参考 ORB 特征提取算法(理论篇) 等博客资料。
- 词袋模型 Bag of Words
BOW 就是 Bag of Words,翻译过来是指词袋,字面上非常直观:装着很多词汇的袋子。那么在这里该如何理解呢?
在一帧图像中可以提取到很多特征点,而每一个特征点可以理解为图像的某一个局部特征,那么相似场景的特征点描述应该是比较接近的。为了判断视频序列中存在的相似场景,我们可以将所有特征的描述统一化,形成一个唯一的描述。显然上文中的“词”就是指这里的特征子,这里采用的方法是一种树状的数据结构,对词汇进行分层聚类,依赖一种基于概率的方法形成一个统一描述,具体原理这里不再赘述。
- 3D-2D:PnP
假设从两张图像中得到了好几对配对好的特征点,那么就可以通过这些二维图像点之间的对应关系,恢复出在两帧之间摄像机的运动。这里涉及到的理论是对极几何方法,经典的有八点法等。
如果两张图像中的特征点的 3D 位置都可以获得,那么最少需要 3 个点对(包括了一个额外验证点)就可以估计相机运动,这里引用了 PnP(Perspective-n-Point)方法。因此,如果使用双目或 RGB-D 进行 SLAM,就可以直接使用 PnP 估计运动,而如果是单目视觉里程计,就需要先进行初始化。
边学边写,发现还有太多理论知识没有涉及到,以后有机会一定,读者有兴趣可以翻阅《视觉 SLAM 十四讲》。
ORB-SLAM 基本流程
 ORB-SLAM 基本流程
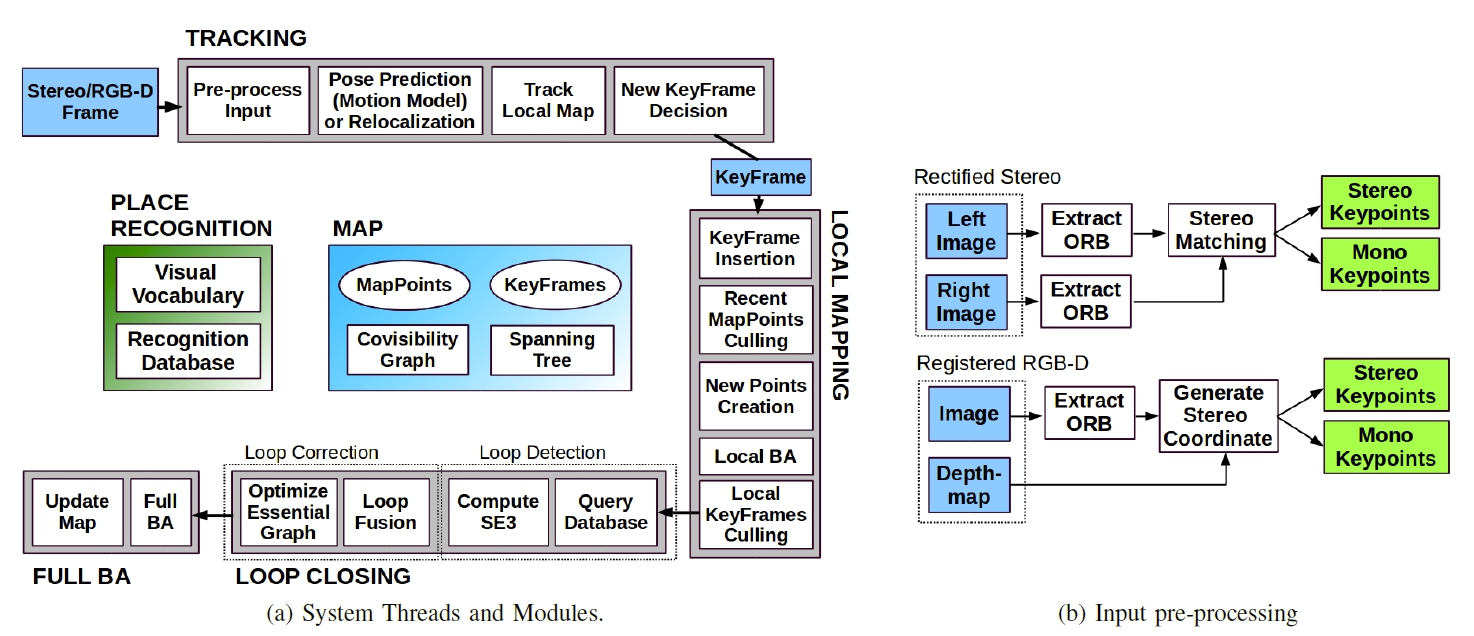
ORB-SLAM 基本流程由上图可以看到,ORB-SLAM 系统主要包括三个部分:Tracking、LocalMapping、LoopClosing。参考了一些博客,有以下简要分析:
- 跟踪(Tracking)
这一部分主要工作是从图像中提取 ORB 特征,根据上一帧进行姿态估计,或者进行通过全局重定位初始化位姿,然后跟踪已经重建的局部地图,优化位姿,再根据一些规则确定新的关键帧。
- 建图(LocalMapping)
这一部分主要完成局部地图构建。包括对关键帧的插入,验证最近生成的地图点并进行筛选,然后生成新的地图点,使用局部捆集调整(Local BA),最后再对插入的关键帧进行筛选,去除多余的关键帧。
- 闭环检测(LoopClosing)
这一部分主要分为两个过程,分别是闭环探测和闭环校正。闭环检测先使用 WOB 进行探测,然后通过 Sim3 算法计算相似变换。闭环校正,主要是闭环融合和 Essential Graph 的图优化。
代码复现
为了对算法有个更直观的认识,我们尝试复现了一下其代码。传感器使用的是单个 RGB 摄像头(偷懒未经标定),直接运行在笔记本上,无 CUDA 加速。基本环境:
- XPS15 9560 Ubuntu 18.4.03 i7-7700HQ 16.0 GB RAM *USB 免驱摄像头 720P 30 帧 焦距 2.15mm/视角 120 度
主要参考的教程为 使用 ROS 跑通 ORB_SLAM2;Ubuntu16.04+Ros+Usb 摄像头跑 ORB SLAM2;ORB_SLAM2 安装 血的教训,现在将我自己遇到过的问题整理如下。
编译过程中出现了关于 Eigen 的 deprecated 错误,提示‘Eigen::AlignedBit’ is deprecated,出现这个问题是因为安装的 eigen 版本太高,需要降低到 3.2.1 版本,然后重新编译安装所有依赖项。此外还要注意有些包搜索依赖的时候和默认路径不一样,例如 pangolin 会在/usr/include目录下进行搜索,导致 pangolin 安装失败。因此手动编译安装 Eigen 之后还需要sudo cp -r /usr/local/include/eigen3 /usr/include拷贝一下,修改路径。
编译完成后,ROS 调用摄像头的时候可能会出现报错,提示Unable to open camera calibration file [/****/****.yaml],其实主要是没有安装 image_view,直接执行sudo apt-get install ros-indigo-image-view即可。另一种可能原因是。launch 文件中的设备号错了,笔记本电脑的 video0 一般是网络摄像头,插入的 USB 摄像头一般是 video1,如果想看 USB 摄像头是哪个端口号,可 cd 到根目录中的 dev 文件夹下查看。
在 ROS 执行。launch 文件的过程中可能会出现报错,提示[****.launch] is neither a launch file in package [****] nor is [****] a launch file name,根本原因就是系统没有把对应的。launch 文件添加到路径里。解决办法是回到上层,重新对。bash 文件执行 source。
最终运行的时候需要开三个终端,执行三个命令。为了方便起见,可以新建一个脚本文件。特别地,我新建了如下的。sh 文件,使用 chmod 命令修改权限之后可以直接执行,一键启动~
#启动 ORB-SLAM2 demo
gnome-terminal -x bash -c "roscore;"
sleep 2
gnome-terminal -x bash -c "source /home/henry/SLAM/usb_cam/build/devel/setup.bash;roslaunch usb_cam usb_cam-test.launch;"
gnome-terminal -x bash -c "rosrun ORB_SLAM2 Mono /home/henry/SLAM/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/henry/SLAM/ORB_SLAM2/Examples/ROS/ORB_SLAM2/my.yaml"
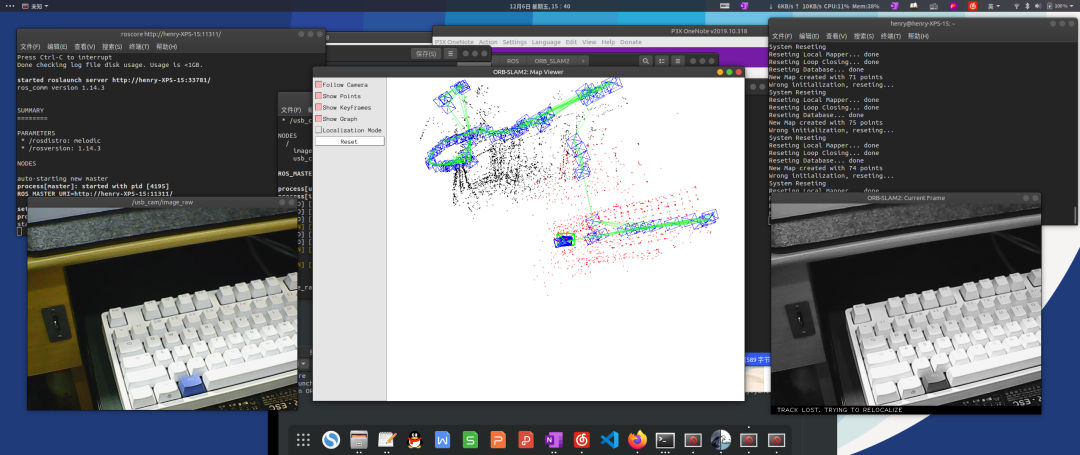 ORB-SLAM 界面
ORB-SLAM 界面最终效果可以查看 演示视频,视频为直接录屏,右上角为原始图像,右下角为 ORB 特征点,左侧为关键帧与建图结果。后期经过调速处理,分为 2P,分别是教学楼走廊以及环教学楼的两个场景,均体现了回环检测的功能。由于均为手持拍摄,原始素材可能有一定的抖动。
本文参考资料: 一步步复现 ORBSLAM2 SLAM 简介 丁有爽